|
[파스텍] 34. Absolute Encoder가 적용된 제품이 있던데, 어떤 경우에 Absolute Encoder를 적용할 수 있나요?
|
설비 구조상 장비 원점을 잡을 수 없는 경우, ABS Encoder 적용이 검토 되어집니다. (공간적인 문제 및 제어적인 문제, 설비 환경적인 문제로 인한 원점센서 사용 불가시)
일반적인 경우에는 Absolute Encoder가 필요하지 않지만 일부 제조 라인에서는 갑작스런 전원 공급 차단 (예를 들어 정전 사태 발생)이 되더라도 현재의 모션 위치를 기억할 수 있어서 전원 재 공급 후 바로 해당 작업 위치에서 모션을 즉각 재 실행 할 수 있습니다. Incremental Encoder의 경우 전원 재 공급 후 모터의 위치가 소실되기 때문에 다시 원점 작업을 통하여 모션을 재실행하여야 하는 불편함이 있습니다. 또한 파스텍에서 채용하는 Absolute Encoder는 보조 전원 장치 (예를 들면 battery back-up)가 필요없는 사양이어서 사용이 편리합니다. 파스텍에서는 아래의 모터+엔코더 및 드라이브/제어기 일체형 제품인 Ezi-SERVO-ALL 제품 중 60mm 모터 제품에 한하여 Absolute Encoder를 채용 및 판매하고 있습니다.
[주문코드 : Ezi-SERVO-ALL-60L-ABS]
단회전 262,144 및 다회전 4,096의 고분해능 절대 위치 엔코더를 장착하여 사용하고 있으며 제품 외관 및 케이블 사양 모두 IP65 등급이 포함되어 있는 제품입니다.

<출처 : Fastech> |
|
[파스텍] 33. Ezi-SERVO의 In-Position 적용 범위는 타 사 제품들에 비해 우월한 부분이 있나요?
|
일정 범위 이내에서는 Open Loop으로 동작하는 Semi-Closed Loop 형태의 타 제품 등에 비교하면 월등히 뛰어난 위치 정밀도를 가집니다.
Ezi-SERVO 시리즈의 In-Position값은 Rotary 설정 스위치 (SW4)에 의해서 설정 가능하며, 위치 결정 완료 신호의 출력 조건을 나타내게 됩니다.
즉, 위치 지령 펄스의 종료 후 목표 위치로부터의 위치 편차가 설정한 In-Position값 보다 적은 경우 위치 결정 완료 신호를 출력하며, 기본 출하시 설정 값은 ‘0’으로 설정 되어 있습니다. 일정 범위 이내에서는 Open Loop으로 동작하는 Semi-Closed Loop 형태의 타 제품등에 비교하면 월등히 뛰어난 위치 정밀도를 가집니다.

또한 Rotary switch 설정에 의해 In-Position 응답을 응답 속도 [Fast Response] 또는 정밀도 [Accurate Response]에 따라, 각기 설정을 하여 적절하게 사용할 수 있습니다.
Ezi-SERVO의 Settling Time은 In-Position 설정 범위에 따라 차이가 있을 수 있습니다. 0~최대 7 Pulse 범위로 In-Position 설정이 가능합니다만, 오차 범위가 커질 수록 상대적으로 In-Position에 대한 응답 속도 즉, Settling Time이 빨라지며 예를 들어 In-Position 값이 최소값인 ‘0’으로 설정 되는 경우에는 최적의 위치 정밀도를 보장하되 상대적으로 position settling time이 약간 길어 질 수 있습니다.

14. 171110_Ezi-SERVOII Plus-E_Closed Loop Stepping System 제어 특징 (Bar)_KOR
<출처 : Fastech> |
|
[파스텍] 32. 5상 스텝 모터를 오랫동안 사용해 온 USER 입니다만, 파스텍 제품은 2상 스텝 모터인데 Ezi-SERVO나 S-SERVO 시리즈로 5상 스텝 모터를 치환할 수 있는지, 그렇다면 그 이유는 무엇인가요? 혹시 참고 할 수 있는 비교 Data 같은 것이 있나요?
|
파스텍의 Ezi-SERVO는 기본 10,000PPR에서 최대 32,000PPR까지의 고분해능 엔코더를 채용하여 사용하고 있습니다. 또한 고정밀도 광학식 엔코더를 채용하여 높은 위치 정밀도를 보장합니다.
또한 엔코더를 채용하더라도 위치 정밀도가 아닌 탈조 방지 용도로 사용 되는 다수의 타 경쟁사 엔코더 기능 대비 (Semi-Closed Loop 기능) 파스텍 제품은 Full Closed Loop System 입니다.
이러한 높은 위치 정밀도를 보장하기 때문에 아래와 같은 다양한 고정밀도 스테이지들에서 최적의 성능을 발휘합니다.
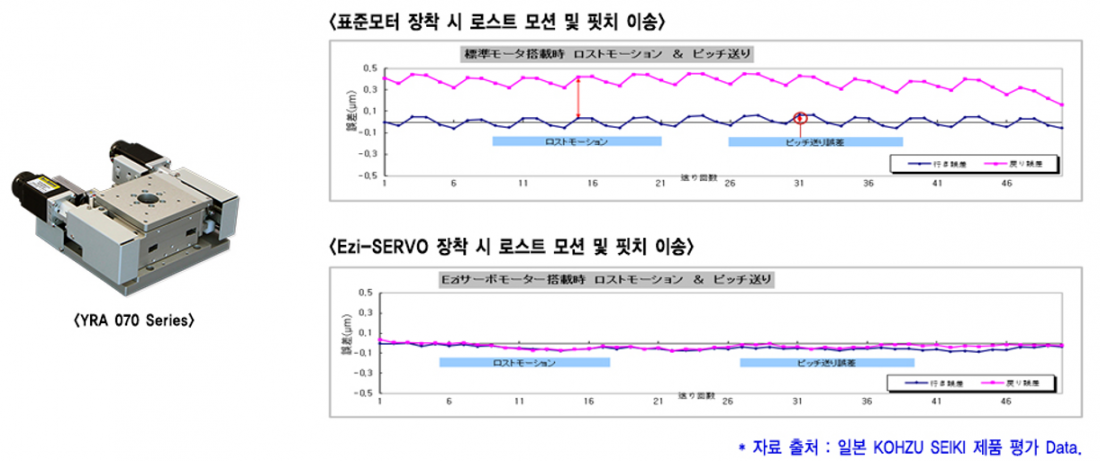
위 그림에서 보시듯이 일반 스텝핑 모터 특히 고정밀도 스테이지에 다수 적용되는 5상 스텝 모터 (위 그래프)에 대비해서도 Ezi-SERVO (아래 그래프) 가 지령 대비 추종성이 약 10배 정도 높은 것을 확인 할 수 있습니다. 따라서 다양한 형태의 얼라인먼트 스테이지에 최적의 솔루션입니다.
<출처 : Fastech> |
|
[파스텍] 31. 일반 마이크로스텝 드라이브들도 분해능 설정을 높게 할 수 있는데 Ezi-SERVO의 경쟁력은 무엇인가요?
|
Ezi-SERVO는 10,000~최대 32,000[ppr]의 고정도 엔코더에 의해 현재 위치를 파악하는 서보 시스템이기 때문에 일반 마이크로스텝 드라이브와는 기본적으로 다른 제품입니다.
일반 2상 혹은 5상 Open Loop Microstep Drive들의 경우 최대 50,000 혹은 100,000 분할 이상으로 드라이브 분해능을 설정 할 수 있으나, 실제 Open Loop Motor의 특성 즉, 구동 방향이나 기타 조건 (정지 시 외력 조건) 들에 의해 정밀한 위치 보정을 할 수 없는 단점이 있습니다.
따라서 일반 Microstep Drive들의 경우 보장할 수 있는 위치 정밀도는 1,000~2,000분할에 못 미치는 경우가 일반적입니다. 장비 전체의 성능 특히, 반복 및 위치 정밀도 또는 Lost Motion 특성등이 Ezi-SERVO가 유리하여, 장비 성능 전체를 향상 시킬 수 있습니다. 
<출처 : Fastech>
|
|
[파스텍] 30. 비전이나 다양한 검사 장비에서 Ezi-SERVO가 우월한 이유는 무엇인가요?
|
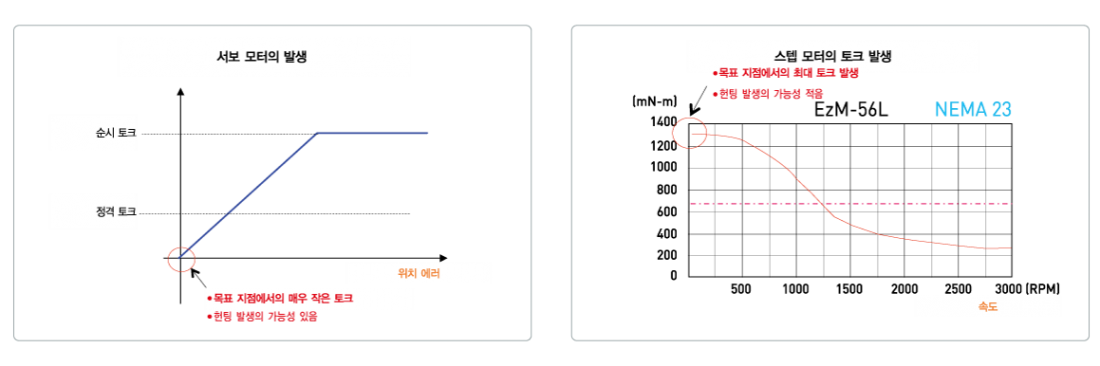
파스텍 제품 Ezi-SERVO는 스텝핑 모터의 특성 즉, 정지 시 모터 최대의 힘 (Holding Torque)을 이용하기 때문에 일반적인 서보 시스템에서 발생하는 헌팅 문제가 없습니다.
따라서, 모터가 정지 후 완전 정지하기 때문에 (서보는 고속 단핏치 모션에서 급감속하여, 목표 위치에서 정지할 경우 급격하게 에너지를 소비해야 하는 대비 모터 정지 시의 모터 최대의 힘 (정격 토크, Rated Torque)이 상대적으로 스텝핑 모터에 비해 작아서, 미세 진동이 발생 할 수 있습니다.
비전 등을 이용한 고속 검사 장비 등에서 Ezi-SERVO는 정지 후 진동이 발생하지 않으며, 특히 부하가 있는 상태의 Z축 Up/Down 모션에 최적의 솔루션입니다. 
· 일반적으로 서보 모터의 토크는 위치 에러에 비례합니다.
· 그러나 스텝 모터의 토크는 위치 에러와 관계가 없습니다.
· 스텝 모터의 토크는 단지 속도에 관계합니다.
<출처 : Fastech>
|
|
[파스텍] 29. Ezi-SERVO의 위치 정밀도는 어느 정도인가요? 엔코더 분해능이 궁금합니다.
|
하기 모터별 엔코더 분해능 표를 참조해 주십시오.
파스텍 제품 Ezi-SERVO는 고정도 광학식 엔코더를 채용하고 있으며 기본 분해능 10,000[ppr] 분할부터 최대 32,000[ppr] 분할까지 선택 및 사용이 가능합니다. 1.8° 2상 스텝 모터를 채용하지만 Ezi-SERVO의 실제적인 위치 정도는 엔코더 분해능에 따르므로, 일반 2상, 5상 스텝 모터 및 타 Closed Loop 제품 대비 정밀도가 훨씬 높습니다.
또한 1펄스 명령도 오차 없이 완벽하게 위치 추종을 하기 때문에 위치 정밀도가 높습니다. 특히, 20mm 모터의 경우는 4,000[ppr] 그리고 28mm 모터의 경우는 16,000[ppr] 엔코더를 채용함으로써, 최고의 정밀도를 보장합니다. 

파스텍의 Ezi-SERVO는 기본 10,000[ppr]에서 최대 32,000[ppr]까지의 고분해능 엔코더를 채용하여 사용하고 있습니다. 또한 고정밀도 광학식 엔코더를 채용하여 높은 위치 정밀도를 보장합니다. 또한 엔코더를 채용하더라도 위치 정밀도가 아닌 탈조 방지 용도로 사용 되는 다수의 타 경쟁사 엔코더 기능 대비 (Semi-Closed Loop 기능) 파스텍 제품은 Full Closed Loop System 입니다. 이러한 높은 위치 정밀도를 보장하기 때문에 아래와 같은 다양한 고정밀도 스테이지들에서 최적의 성능을 발휘합니다.

위 그림에서 보시듯이 일반 스텝핑 모터 특히 고정밀도 스테이지에 다수 적용되는 5상 스텝 모터(위 그래프)에 대비해서도 Ezi-SERVO(아래 그래프)가 지령 대비 추종성이 약 10배 정도 높은 것을 확인 할 수 있습니다. 따라서 다양한 형태의 얼라인먼트 스테이지에 최적의 솔루션입니다. 또한 파스텍의 Ezi-SERVO는 외부 Linear Scale을 적용하거나 Linear Step Motor도 Closed Loop 제어할 수 있기 때문에 선택의 폭이 훨씬 높습니다. Real Time Full Closed Loop 제어 실현을 통해 Linear Scale 적용 및 그 동안 Open Loop 형태로 사용된 Linear Step Motor도 Closed Loop 제어하여 정밀도를 크게 향상 시킬 수 있습니다.

<출처 : Fastech> |
|
[파스텍] 28. Closed Loop 제어 시스템이란 무엇인가요?
|
기본적으로 Closed Loop 제어 시스템 즉, Closed Loop 제어 시스템이란, 출력 신호가 제어 동작에 직접적인 영향을 받는 시스템을 말합니다. 입력 신호와 피드백 신호의 차이가 오차 제어 동작 신호이며, 이 신호가 제어기에 전달되어 오차를 감소시키고 최종적으로는 시스템의 출력을 요구하는 수치에 도달하도록 하는 것입니다. 아래의 그림은 파스텍의 Closed Loop 제어 시스템을 설명하는 도식입니다.
Ezi-SERVO는 Closed Loop 제어 시스템이며, 모터에 장착된 고정도 엔코더에 의해 항상 현재 위치를 파악하고 있어 탈조가 발생하지 않는 서보 시스템이며, 엔코더 피드백에 의해 항상 현재 위치를 파악하며 필요 시 위치 보정을 합니다. (25μsec 주기)

더불어 일반 서보 시스템처럼 엔코더에 의한 피드백을 받기 때문에 최근 “Step Servo” 라고 불리기도 합니다. 서보 모터 제어 시스템과 다른 점
1. 게인 조정이 필요하지 않습니다.
2. 정지 후 미세 진동 없이 안정된 목표 위치를 유지합니다.
3. 독자적인 제어 알고리즘에 의해 빠른 위치 결정이 가능합니다. (고속, 단피치 운동에 적합)
4. 고속, 단피치 운동인 경우, Settling Time이 짧기 때문에 비전을 이용한 검사 장비 등에서 우수한 성능을 발휘합니다.
또한 일반 Open Loop 제어 스텝핑 모터 시스템과는 다른 다양한 차이점들을 가지고 있습니다. 그 차이점들은 아래 설명을 참조해 주세요. Open-Loop 제어 스텝핑 모터 시스템과 다른 점
1. 탈조에 의한 위치 오차 없이 정확한 위치 결정이 가능합니다.
2. 정지 시는 안정된 유지력을 갖고 있고, 기계 진동 등의 외력에 의한 위치 오차가 생겨도 자동적으로 목표 위치로 복귀합니다.
3. Open-Loop 제어 스텝핑 모터의 경우 탈조를 고려하여 모터 토크의 약 50%정도 밖에 사용하지 못하지만 Ezi-SERVO는 100% 사용 가능합니다.
4. Open-Loop 스텝핑 모터는 부하의 변동에 관계 없이 모든 동작 속도에서 정전류 구동을 하지만 Ezi-SERVO는 부하에 따라 전류를 제어하기 때문에 고속 운전이 가능합니다.(최고 속도 : 3000[rpm])
<출처 : Fastech> |
|
[파스텍] 27. 귀사의 Closed Loop 시스템과 일반 모터 시스템을 네트워크 방식으로 제어하고 싶은데, 적절한 솔루션이 있습니까?
|
네 있습니다.
파스텍 제품의 Ezi-SERVOII Plus-E 시리즈는 PC/PLC의 표준 “Ethernet” 통신을 기본으로 하고 있으며 Ezi-MotionLink PE 라는 단축 제어기를 사용하면 하나의 장비에서 다른 AC 서보 제품들과 하나의 네트워크로 제어가 가능합니다.
더하여 Ethernet을 지원하는 I/O 모듈을 제공 하여 하나의 “Ethernet “ 네트워크 하에서 서보모터, 스텝모터, I/O를 동시에 제어 하실 수 있습니다.
그 외에도 산업용 Field network 인 EtherCAT , CC-Link를 지원하는 제품도 제공해 드리고 있습니다. 


<출처 : Fastech> |
|
[파스텍] 26. LabView를 사용하여 Ezi-SERVOII Plus-E 제품을 사용할 수 있나요? 사용할 수 있다면 간단하게 참조 할 수 있는 사용자 매뉴얼을 받을 수 있을까요?
|
LabView를 사용하여 Ezi-SERVOII Plus-E 제품을 사용하실 수 있습니다.
Microsoft Windows XP 이상 및 Microsoft. NET Framework 2.5 이상 설치 환경에서 사용 가능하며, LabView 2010, LabView 2012 환경에서 사용 가능합니다. LabView 2012에서 제작된 예제 매뉴얼 제공이 가능하며 LabView 2012에는 다른 장비에 대한 라이브러리를 추가 하지 않은 상태입니다. 라이브러리 추가 시 다른 장비의 라이브러리와 충돌 되지 않도록 라이브러리 설정을 정리하여 사용해 주시기 바랍니다. LabView는 시리얼 통신 예제가 기본적으로 제공됩니다. 이를 사용하여 제작 시 통신 기능매뉴얼을 참조하시어 명령에 대한 프레임 데이터를 각각 제작하여 사용해야 하며, 숙련된 사용자일 경우, “vi와 컨트롤 설정"에서 사용되지 않은 명령과, 함수의 변수 설정을 변경하여 사용하실 수 있습니다. 사용자 매뉴얼 및 자세한 사항은 파스텍 영업팀으로 문의하시기 바랍니다. (Tel. 032-234-6300)
<출처 : Fastech> |
|
[파스텍] 25. Ezi-SERVOII Plus-E 제품의 프로그래밍 언어는 C 언어 기반인가요?
|
Ezi-SERVOII Plus-E 제품은 C/C++ 기반으로 제작된 모션 라이브러리를 제공하며, 사용 환경 OS는 Window System XP/7/8/10 (32, 64 bit) 입니다. 그리고, C#에서 프로그래밍 할 수 있도록 CS 파일도 제공합니다. 제품 사용에 필요한 라이브러리 및 예제 프로젝트는 당사에서 제공하는 Setup 파일에 포함되어 있습니다. 그 밖에 Visual Basic 등 대부분의 프로그래밍 언어에서 제공하는, DLL Library를 Importing 하거나 DLL을 해당언어에서 호출해 사용할 수 있는 기능을 통해 이용하실 수 있습니다. 관련 예제 프로그램 및 자세한 사항은 당사 영업팀 으로 문의하시기 바랍니다.
(Tel. 032-234-6300)
<출처 : Fastech> |